Dead Reckoning (DR) metoda ocenjevanja položaja in navigacije
Dead Reckoning (DR) navigacijska metoda za ocenjevanje položaja brez GPS, uporabna za mornarje, pilote in vozila, zgodovina in praktične uporabe
Dead Reckoning (ali DR) je osnovna metoda ocenjevanja položaja in sledenja premikanju. Temelji na začetni znani točki (fiks) ter meritvah hitrosti, smeri in časa, ki so bile zabeležene od takrat, ko se je subjekt (ladja, letalo, vozilo ali robot) nahajal na tej točki. Na kratko: novi položaj dobimo z dodajanjem premikov (hitrost × čas, usmerjeni po trenutni smeri) k zadnjemu znanemu položaju.
Galerija slik
3 Slike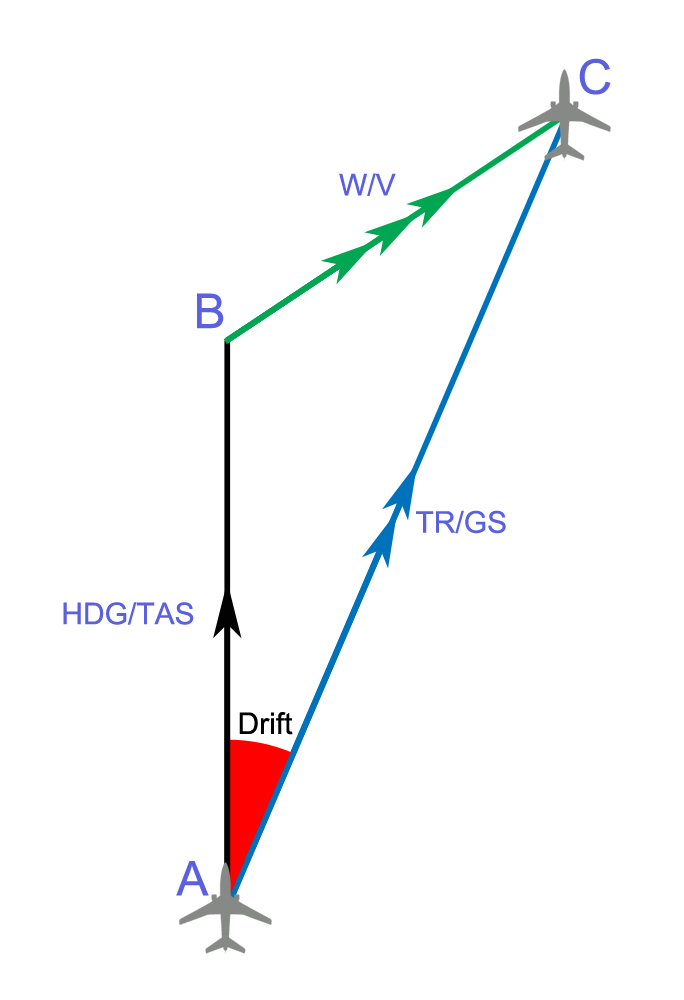


Kako deluje
V praksi DR uporablja instrumente za merjenje hitrosti in smeri ter računa premik v diskretnih časovnih intervalih. Tipični senzori so:
- magnetni kompas ali gyrocompass za smer;
- log (pri ladjah), odometer ali merilnik hitrosti pri vozilih;
- pitot cevi pri letalih ali senzorji Dopplerja pri podvodnih plovilih;
- IMU (inercialna merilna enota) z merjenjem pospeškov in kotnih hitrosti.
Računski postopek je ponavadi enostaven v konceptu: integriramo hitrost v smeri trenutno izmerjene orientacije skozi čas. V sodobnih sistemih se pogosto uporablja filtriranje (npr. Kalmanov filter) za združevanje različnih virov podatkov in zmanjševanje vpliva šuma in naključnih napak.
Uporaba in primeri
Dead Reckoning se uporablja pri:
- sledenju položaja ladij in letal, kadar so satelitske storitve nedosegljive;
- avtonomnih vozilih in robotiki, kjer so GPS-signali šibki ali nezaželeni;
- podvodnih plovilih (AUV), ki nimajo dostopa do globalni sistem za določanje položaja;
- kriznih ali začasnih situacijah, ko je treba delovati brez zunanjih navigacijskih popravkov.
Čeprav danes pogosto uporabljamo globalni sistem za določanje položaja (GPS), je metoda DR pomembna kot rezerva ali dopolnilo — še posebej na območjih brez signala ali med kratkimi prekinitvami posodobitev.
Omejitve in kako zmanjšati napake
Glavna slabost dead reckoning-a je kumulativna napaka: majhne netočnosti pri merjenju hitrosti ali smeri se sčasoma seštevajo, zato ocena položaja "drifta". Glavni viri napak so:
- napake v senzorjih (baze, vzdrsenje kompassa, drsnost loga);
- zunanji vplivi, kot so tokovi, veter ali zdrs podvozja;
- časovne napake in napačna sinhronizacija meritev.
Načini za zmanjšanje tega problema vključujejo:
- redne korekcije z znanimi fiksnimi točkami ali meritvami z GPS-om;
- kombinacijo z inercialnimi navigacijskimi sistemi (INS) in uporabo filtrov za združevanje podatkov;
- uporabo dodatnih virov, npr. doppler senzorjev, zvezdne (celeste) navigacije ali primerjavo z zemljevidom (map matching);
- periodično preverjanje in kalibracija instrumentov.
Zgodovina in pomen
Dead reckoning je bila ključna tehnika v zgodnji pomorski navigaciji. Po prihodu Krištofa Kolumba v Novi svet so pomorščaki kartirali svet in s pomočjo zvezd lahko določili zemljepisno širino. Pred razvojem natančnih ur pa ni bilo zanesljive metode za določanje zemljepisne dolžine na odprtem morju, zato so pomorščaki pogosto uporabljali izračun položaja po premikih — torej dead reckoning.
V zgodnejši 20. stoletju so takšne metode pomagale tudi letalcem. Na primer, Richard Byrd je leta 1926 trdil, da je kot prvi človek poletel na severni tečaj; njegov polet je trajal približno 16 ur in se je po poročanju vrnil na izhodiščno mesto, čeprav je bila pod njim le ledena površina.
V praksi se potapljači, mornarji in piloti še vedno učijo osnov dead reckoning-a, ker je to zanesljiva rezerva v primerih, ko satelite GPS poškoduje sončni izbruh ali da se oprema izgubi ali pokvari. Dobro razumevanje te metode poveča varnost in zanesljivost navigacije tudi v sodobnih sistemih.

Metoda
Mrtvo merjenje se začne na znani točki (fiks). Nato je treba poznati hitrost vozila. V starih časih so na ladjah čez bok metali hlod (privezan na vrv) in šteli, koliko časa je bilo potrebno, da je ta hlod minil (ali pa so vlekli vrv z vozli in šteli, koliko vozlov se izvleče v določenem času). To bi pokazalo hitrost ladje. Če bi poznali smer iz kompasa, bi dobili smer. Na podlagi teh dveh števil bi lahko ocenili (dobro uganili) trenutno lokacijo vozila. Vendar veter potiska vozilo na eno stran (tako imenovani drift), zato je treba izmeriti tudi to. V vodi obstajajo tudi tokovi, celo sredi oceana. Sčasoma lahko pride tudi do napak, zato so bile izdelane karte, ki tokove popravljajo.
Letala lahko zlahka izmerijo hitrost vetra (kako hitro se gibljejo po zraku), ne pa tudi hitrosti gibanja po zemlji (t. i. hitrost na tleh). Hitrost na tleh se spremeni zaradi čelnega, hrbtnega ali bočnega vetra. Če poznamo višino letala, lahko hitrost na tleh ugotovimo tako, da izmerimo, kako hitro letalo leti mimo predmeta na tleh. (Višje kot ste, počasneje se premikajo tla). Z okencem na tleh letala lahko ugotovimo hitrost na tleh in premikanje letala.
Vozilo na tleh lahko uporablja tudi mrtvi tek. Običajno jim ni treba skrbeti za odnašanje zaradi vetra, na kopnem pa ni tokov, zato je to določanje lažje.
Vprašanja in odgovori
V: Kaj je Dead Reckoning?
O: Dead Reckoning (ali DR) je metoda ocenjevanja položaja z uporabo zadnje znane točke, hitrosti in smeri gibanja.
V: Za kaj se uporablja metoda Dead Reckoning?
O: Mrtvi tek se uporablja za določanje položaja ladje, letala ali vozila.
V: Zakaj se zdaj ne uporablja več tako pogosto?
O: Za navigacijo se zdaj uporablja globalni sistem za določanje položaja (GPS), zaradi česar je ugotavljanje položaja manj pomembno.
V: V katerih situacijah je dead reckoning še vedno uporaben?
O: Mrtvi čas je uporaben na območjih, kjer GPS ni na voljo, ali za kratek čas, če se GPS ne posodobi.
V: Zakaj je pomembno poznati funkcijo Dead Reckoning?
O: Poznavanje sistema Dead Reckoning je pomembno v primeru poškodbe satelitov GPS ali izgube opreme, tako da lahko mornarji in piloti še vedno krmarijo.
V: Kako so pomorščaki po prihodu Krištofa Kolumba v Novi svet kartirali svet?
O: Mornarji so za ugotavljanje zemljepisne širine in kartiranje sveta uporabljali Dead Reckoning in zvezde.
V: Kako je Richard Byrd postal prvi človek, ki je poletel na severni tečaj?
O: Richard Byrd je leta 1926 s pomočjo metode Dead Reckoning poletel na severni tečaj, letel 16 ur in se vrnil na mesto, ki ga je zapustil, saj so bila pod njim le ledena polja.
Sorodni članki
Avtor
AlegsaOnline.com Dead Reckoning (DR) metoda ocenjevanja položaja in navigacije Leandro Alegsa
URL: https://sl.alegsaonline.com/art/25956
Viri
- deadreckoning.com : "Reckoning Aviation Navigation"
- belfortinstrument.com : "How Byrd Navigated to the North Pole"
- ship468.org : "Sea Scout Ship, Navigation"